| Интерфейс удаленного управления |
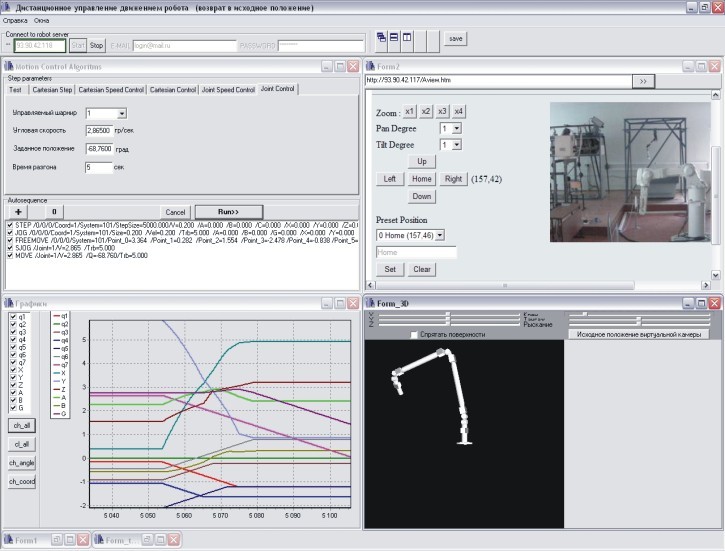
Интерфейс удаленного управления используется как для управления виртуальным роботом, так и предусматривает подключение по описанной выше схеме к реальному оборудованию - роботу Kawasaki. Соответствующее Windows-приложение генерирует многодокументный дружественный интерфейс в стиле MDI (Multi Document Interface). Этот стиль предполагает создание главного окна MDI (его обычно называют рамочным), внутри которого по мере надобности появляются дочерние окна, которые не могут выходить за границы главного. С помощью директив меню "Окна" пользователь может расположить дочерние окна каскадом, выровнять по горизонтали или вертикали, упорядочить или свернуть все. 
В верхней части главного окна расположены поля для авторизации удаленного пользователя - e-mail и пароль. Адрес сервера робота отображается внутри цветового индикатора состояния Интернет-соединения. Для установления соединения пользователю достаточно нажать на клавишу "Start". Как только получено подтвеждение соединения от сервера цвет индикатора с серого меняется на желтый, в противном случае - на красный.
После установления соединения сервер начинает отправлять данные о текущем положении робота и индикатор становится зеленого цвета. Цвет индикатора становится синим, если связь с сервером установлена, но отсутствует его подключение к Model-серверу.
Для предупреждения ошибочных действий пользователя во время установления соединение и в течение всего периода приема данных кнопка "Start" заблокирована. Для отключения требуется нажать на кнопку "Stop" или закрыть приложение: и в том и другом случае появится окно предупреждения, и пользователь должен будет подтвердить свои действия, либо продолжить сеанс удаленно управления. После этого программа заблокирует приложение до момента корректного закрытия соединения и безопасного завершения всех запущенных потоков.
Текущее состояние робота отображается в заголовке главного окна.
В отдельном окне осуществляется формирование миссии робота из следующего набора элементарных команд управления, размещенных на одноименных вкладках:
Free Move - перемещение в точку с заданными пользователем декартовыми координатами;
Step - перемещение по одной из декартовых координат схвата на заданную величину;
Jog - перемещение схвата по одной из шести декартовых координат с заданной скоростью;
Single Joint Jog - движение с заданной скоростью в одном (выбранном на форме) шарнире;
Single Joint Move - перемещение одного из шарниров в заданное положение;
Тестовый режим - подача ступенчатых управляющих воздействий поочередно в приводы каждой из степеней подвижности.
Для ввода параметров приведенных выше команд на вкладках расположены специальные поля ввода, которые не позволяют вводить заведомо ошибочные значения, о чем сообщается пользователю.
После отправки сформированной миссии на Web-сервер начинается процесс сбора данных о состоянии робота. Полученные данные отображаются в виде таблицы, графиков и 3D-модели робота в соответствующих окнах программы.
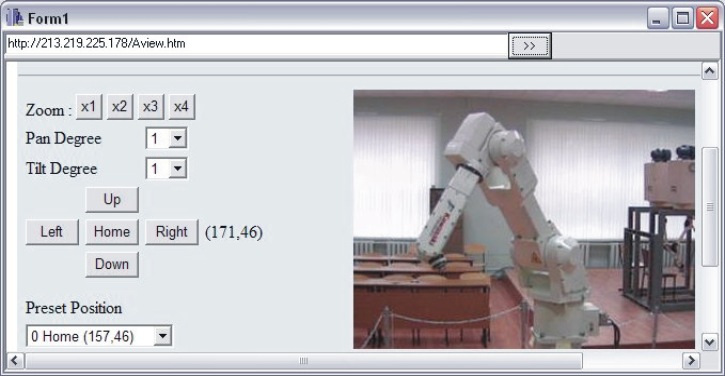
При управлении реальным робототехническим оборудованием становится доступным окно связи с Интернет-камерой-сервером, передающей динамическое видеоизображение робота Kawasaki, что позволяет сопоставить перемещения 3D-модели и реального робота.
Развитый пользовательский интерфейс и гибкая организация вычислений дают возможность моделировать и имитировать с помощью имеющегося оборудования функционирование манипуляционных роботов широкого класса в штатных и нештатных режимах, как реальных, так и перспективных. Это позволяет использовать Интернет-лабораторию для широкого круга задач подготовки специалистов как в области разработки, так и использования робототехнических систем, в том числе на различных уровнях обучения.
|