|
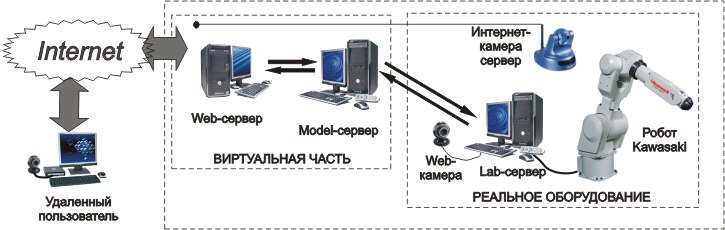
Интегрированная система удаленного доступа объединяет в себе виртуальную и реальную части. 
Виртуальная часть программного комплекса включает в себя Web-server и Model-server. Пользовательский интерфейс удаленного управления представляет собой Windows-приложение, которое пользователь может загрузить с сайта лаборатории по ссылке, полученной после согласования условий проведения сеанса удаленного управления с администрацией создаваемой на базе системы удаленного управления Интернет-лаборатории.
В согласованное время удаленный пользователь подключается через сеть Интернет к программному обеспечению Web-сервера лаборатории, осуществляющего авторизацию пользователя и последовательную трансляцию Model-серверу команд управления в составе сформированной пользователем миссии.
При работе с виртуальным роботом Model-сервер отрабатывает на математической модели робота заданные пользователем команды и возвращает параметры состояния виртуального робота с частотой около 3-х раз в секунду. Полученные Web-сервером данные транслируются в клиентский пользовательский интерфейс через сеть Интернет. Программное обеспечение Web-сервера также определяет статус Model-сервера и обеспечивает после завершения отработки текущей команды либо запуск следующей в миссии команды либо завершение сеанса удаленного управления.
При работе с реальным роботом параметры состояния математической модели робота непрерывно передаются от Model-сервера к управляющему роботом Lab-серверу. Основной задачей последнего является перемещение манипуляционного робота Kawasaki с полученными от модели координатами и скоростями перемещения звеньев робота при соблюдении условии их выполнимости. Для автоматизированных систем удаленного управления столь сложным робототехническим оборудованием главным требованием является защита от запуска миссий, при которых возможен выход из строя электронных и механических систем робота
Поэтому нами предусмотрена многоступенчатая система контроля выполнимости команд на всех этапах работы комплекса удаленного управления. Поскольку операционная система блока управления предоставляет широчайшие возможности по управлению манипулятором, при организации системы сетевого управления на Lab-сервер возложены функции автоматической блокировки команд удаленного пользователя, которые являются опасными и могут привести к поломке дорогостоящего оборудования.
Пользовательский интерфейс удаленного управления обеспечивает также подключение к Интернет-камере-серверу, транслирующему видеосигнал с изображением робота. Пользователь может перемещать объектив камеры по горизонтали и вертикали, увеличивать и уменьшать изображение, рассматривая отдельные части робота.
Во время сеанса удаленного управления поддерживается мультимедиа связь с оператором робота. Для этого используется свободно распространяемая программы Skype, которая устанавливается на компьютере удаленного пользователя. Установленные на Lab-сервере мультимедиа-компоненты поддерживают прямую дуплексную аудио- и видеосвязь с оператором робота, контролирующего ход выполнения миссии пользователя.
|