Функционально-моделирующий стенд оснащен несколькими системами технического зрения.
Монокулярная СТЗ
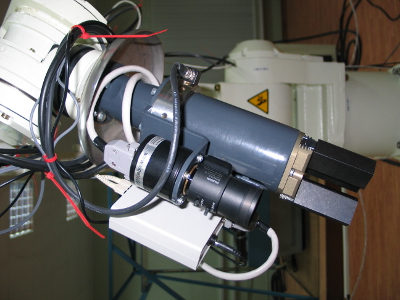
Система технического зрения стенда на основе цифровой системы ввода изображения (ЦСВИ) «ВИДЕОСКАН-415-ВО/50» предназначена для распознавания мишени специальной формы и определения расстояния до такой мишени.
Камера СТЗ стенда размещена на одном из ПР Kawasaki FS020N. Сцена, спроецированная на цифровую матрицу камеры, передается в один из компьютеров стенда и обрабатывается программным обеспечением СТЗ.
Результатом обработки является расстояние до мишени в виде трех линейных и трех угловых координат, либо сигнал о том, что мишень в поле зрения камеры отсутствует или не распознана. Программное обеспечение (ПО) СТЗ может быть подключено в качестве клиента по протоколу TCP/IP к программным средствам, управляющим ПР. В этом случае ПО СТЗ передает информацию о расстоянии до мишени серверу, управляющему ПР.
Частота обработки данных ПО СТЗ ограничена частотой обновления информации на матрице камеры и равна 25 Гц.
Камера системы технического зрения может также использоваться оператором в качестве обзорной камеры.
Видеоинформация от камеры в таком режиме будет передаваться оператору на пост управления манипулятором.
Стерео-СТЗ
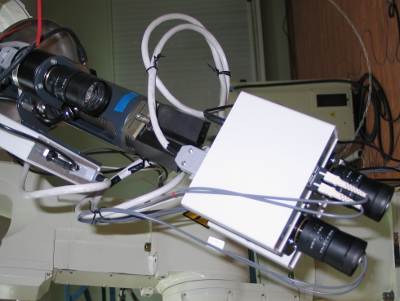
Для обеспечения стереонаблюдения и стереоизмерения рабочей зоны ПР стенд оснащен аппаратно-программным устройством наблюдения с двух цифровых камер – стереосистемой технического зрения. ССТЗ аппаратно объединяет в себе две ЦСВИ «ВИДЕОСКАН-415-ВО/50», камеры которых снабжены вариофокальными объективами, аналогичными используемым на камере СТЗ.
Цифровые камеры устройства стереосъемки объединены в стереокамеру. Стереокамера является единым блоком, в котором камеры ЦСВИ размещены таким образом, что их оптическое оси параллельны, а расстояние между осями равно 65 мм, что соответствует расстоянию между зрачками человека. Камеры жестко закреплены в устройстве.
На корпусе стереокамеры размещены модули-преобразователи волоконно-оптического интерфейса ЦСВИ.
Стереокамера не является устройством, интегрированным в рабочий орган ПР. Установка стереокамеры на ПР предполагает использование захватного устройства. На корпусе стереокамеры предусмотрен специальный такелажный элемент, позволяющий захватывать камеру схватом ПР.
Система построения карты глубин видимой сцены на базе Microsoft Kinect

|
В дополнение к моно- и стереокамерам стенд оборудован системой постороения карты глубины сцены.
Сенсор Kinect, разработанный компанией Microsoft на основе датчиков глубины компании PrimeSense, установлен на ПР Kawasaki FS003N стенда.
ИК-приемник в совокупности с инфракрасным излучателем Kinect и алгоритмами обработки искажений подсветки фактически представляет собой трехмерный сканер на основе структурированной подсветки и позволяет построить карту глубин сцены в виде облака точек, координированных по высоте, ширине и глубине в системе координат камеры.
На базе такой карты глубин возможно построение трехмерной модели рабочей зоны робота.
|

