Интернет-лаборатория "Робототехника" создана на базе разработанного в Дмитровском филиале МГТУ им. Н.Э. Баумана уникального функционально-моделирующего стенда (ФМС), позволяющего отрабатывать управление роботами Международной космической станции. Лаборатория предоставляет возможность, используя технологии сетевого доступа, проводить комплексные удаленные лабораторные практикумы на реальном сложном робототехническом оборудовании.
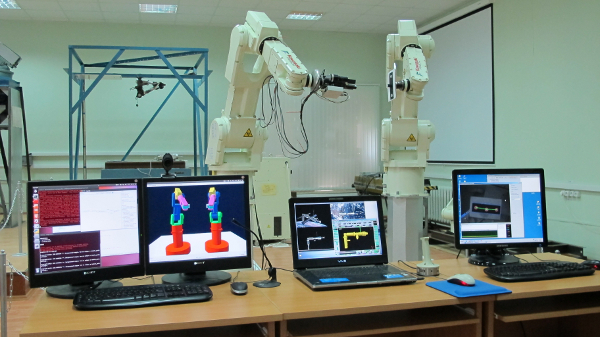
ФМС представляет собой полунатурный комплекс, включающий в себя несколько объединенных по сети персональных компьютеров, промышленные роботы, средства человеко-машинного интерфейса, мультимедиа-системы с передачей изображения через сеть Интернет.
ФМС КМР – эффективный инструмент для проведения исследований по широкому кругу проблем космической робототехники (человеко-машинный интерфейс, роботизированные технологии сборки и обслуживания и др.). ФМС может служить ядром для построения тренажных средств, а также систем подготовки и сопровождения роботизированных операций в космосе.
ФМС позволяет:
– Моделировать в реальном масштабе времени динамические процессы и процессы управления различными КМР как в виртуальной форме, так и на физическом уровне, в том числе – при выполнении контактных операций, операций с использованием реальной аппаратуры систем наведения, рабочих инструментов и различных средств человеко-машинного интерфейса.
– Подготавливать, отрабатывать и верифицировать алгоритмы управления и программы действий («автосеквенции») широкого класса современных и перспективных КМР.
– Осуществлять регистрацию параметров динамических процессов и логики функционирования; выполнять оценку эффективности систем управления и управляющей деятельности операторов КМР, разрабатывать и реализовывать эффективные методики подготовки экипажей к управлению КМР.
– Осуществлять дистанционный доступ к управлению полунатурной моделью (по сети Internet) с использованием режима видеоконференции.
На сайте опубликована информация об устройстве стенда, приведены фотографии основных компонентов, схемы их функционирования и характеристики. Программное обеспечение стенда предоставляет возможность реализовать все основные операции и режимы управления, характерные для манипуляционных роботов (МР), в том числе - выбирать системы координат, выполнять команды управления скоростью движения и положением МР. Команды позволяют управлять движением МР как в свободном пространстве, так и на границе свободной зоны. Удаленный пользователь имеет возможность сформировать и исполнить индивидуальные сценарии функционирования МР (миссии), состоящие из последовательности команд управления движением. Представлен пользовательский интерфейс удаленного сетевого управления ФМС.

